像素深度 PixelDepth
- 解释:输出当前所渲染像素的深度,即该像素与摄像机之间的距离。
- 单位:厘米(cm)
场景深度 Scene Depth
- 解释:输出对应视口UV下现有的场景深度。
- 输入:视口UV
- 单位:厘米(cm)
警告
只有半透明材质可以使用
世界位置转深度 DepthFromWorldPosition
- 解释:通过给定的世界位置获得观察空间下的Z值
- 输入:世界位置
- 单位:厘米(cm)
- 原理:计算一个位置向量(从摄像机指向目标点)在摄像机视线方向上的投影长度 $$ \text{Depth} = (\text{Position}_{\text{Target}} - \text{Position}_{\text{Camera}}) \cdot \text{Direction}_{\text{Camera}} $$
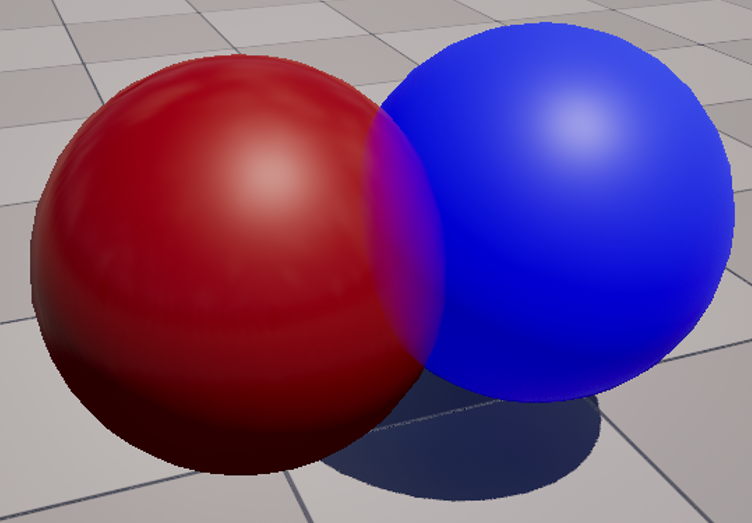
深度消退 DepthFade
- 解释:根据深度调节不透明度,常用于隐藏对象与对象相交时出现的不美观接缝
- 输入:
Opacity—— 接收深度消退前对象的现有不透明度FadeDistance—— 发生消退的全局空间距离
- 输出:调整后的不透明度
摄像机深度消退 CameraDepthFade
- 解释:根据像素与相机的深度差值,创建一个从相机附近开始为0、远离相机逐渐变为1的渐变值。常用于防止粒子等半透明对象穿插相机时的视觉破绽(camera clipping)。
- 输入:
Fade Length—— 渐变范围的长度,决定从相机开始多远处达到最大值Fade Offset—— 在渐变开始前的偏移距离,用于微调开始消退的距离For Vertex Shader—— 是否为顶点着色器使用(布尔),在需要顶点处理时启用
- 输出:0 ~ 1 的浮点值,表示当前像素距离相机的渐变权重
